Jeremie Dequidt

Research Impact
Dirk Bartz Prize for Visual Computing in Medicine
Surgery Training, Planning and Guidance Using the SOFA Framework
Système et procédé de suivi du déplacement d'un instrument médical dans le corps d'un sujet
with Mario Sanz Lopez, Stephane Cotin, Christian Duriez
System and Method for Monitoring the Movement of a Medical Instrument in the Body of a Subject
with Mario Sanz Lopez, Stephane Cotin, Christian Duriez
Runner-up Best Paper Award
ISMAR
Top Ranked AR/VR paper
TVCG presented at SIGGRAPH Asia
Top Ranked AR/VR paper
TVCG presented at SIGGRAPH
Best Paper Award
SIMPAR
Best Paper Award
Advanced Robotics
Recent Talks
View all →The Compliant Machine: Simulation, Control, and Medical Applications of Soft Robots
Høgskolen på Vestlandet Universitet - Robotics
The Compliant Machine: Simulation, Control, and Medical Applications of Soft Robots
Norges Teknisk-Naturvitenskapelige Universitet
Gentle Precision: Robotizing Neurotech
Karolinska Institutet
Portfolio
Active Phantoms
We have worked on the simulation of active phantoms. The simulation relies on an accurate reconstruction of the patient anatomy and a real-time model of the surgical devices (catheter, guide-wire, coil...) for which sliding and friction contacts are taken into account.
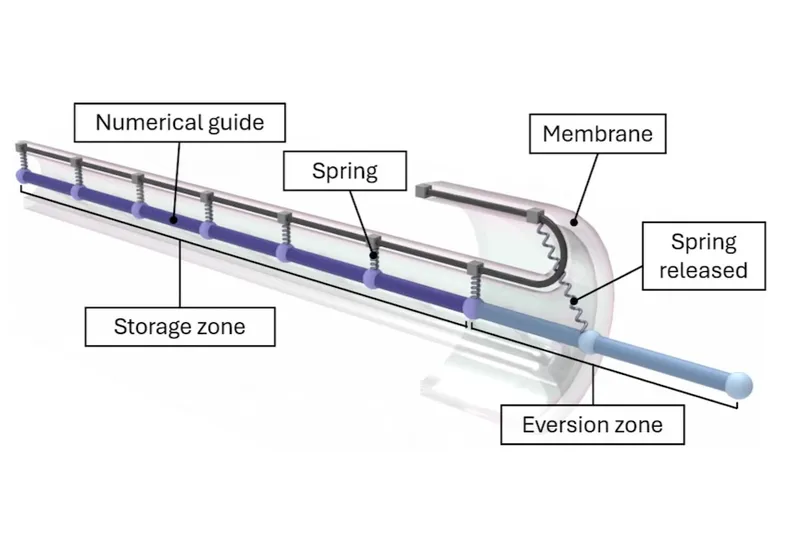
Soft Medical Devices
We have worked on the simulation of soft medical devices. The simulation relies on an accurate reconstruction of the patient anatomy and a real-time model of the surgical devices (catheter, guide-wire, coil...) for which sliding and friction contacts are taken into account.

Neurosurgery Simulation
We have developed real-time simulation techniques for neurosurgery training and planning. Our approach combines accurate anatomical models with interactive deformation and cutting, enabling surgeons to practice complex procedures in a virtual environment.
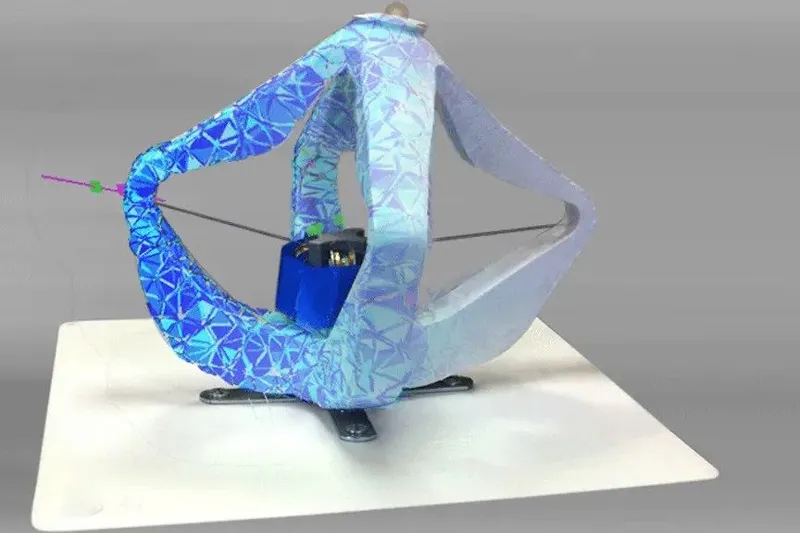
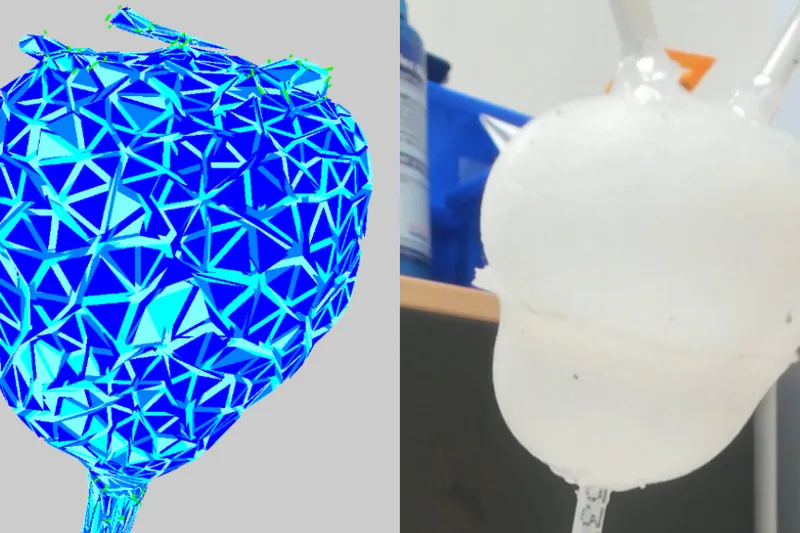
Visual Servoing of Soft Robots
In order to increase the control accuracy of soft robots, we have worked on servoing where IR cameras track the deformation of a soft robot and this visual feedback is used by our digital model. Even on dynamic scenarios, precision and accuracy are increased even when visual feedback is temporarily lost.
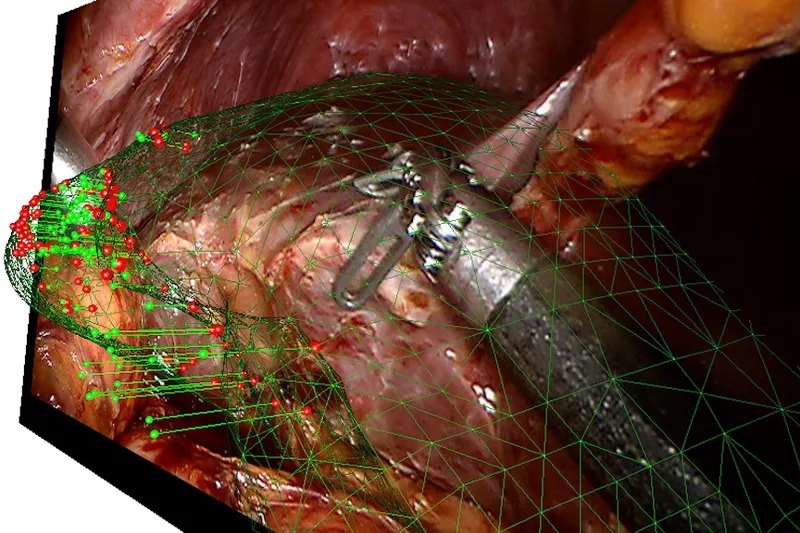
Augmented Reality of Soft Objects
We have proposed some methods for real-time augmented reality of internal liver structures during minimally invasive hepatic surgery. Vessels and tumors computed from pre-operative CT scans can be overlaid onto the laparoscopic view for surgery guidance.
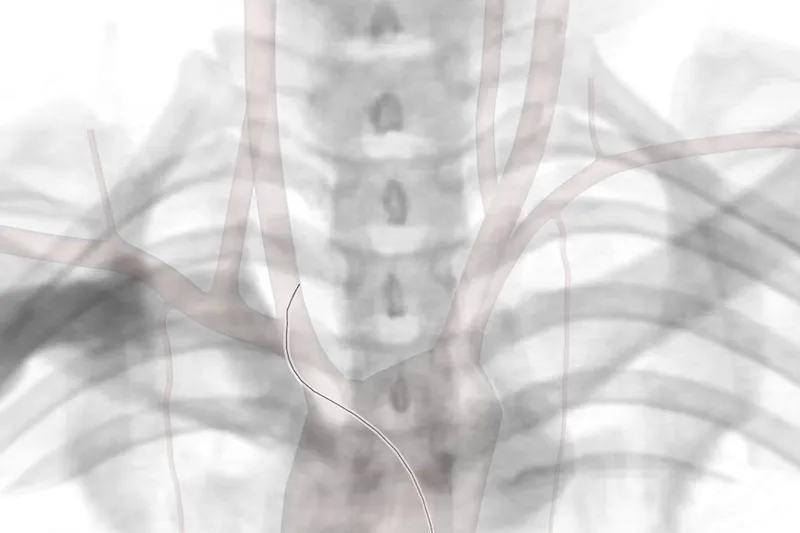
Interventional Radiology Simulator
We have worked on the simulation of interventional radiology procedures. The simulation relies on an accurate reconstruction of the patient anatomy and a real-time model of the surgical devices (catheter, guide-wire, coil...) for which sliding and friction contacts are taken into account.
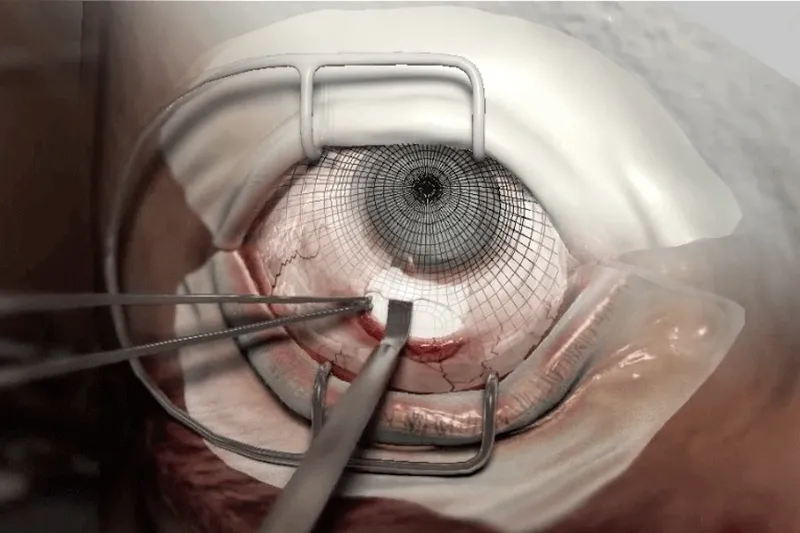
Cataract Surgery Training Simulator
We have developed a simulation framework in order to perform interactive cataract surgery simulations. Combination of a high-fidelity simulation (advanced bio-mechanical models and intensive use of modern graphics hardware) and replicas of actual surgical tools are able to improve surgeon immersion while training.
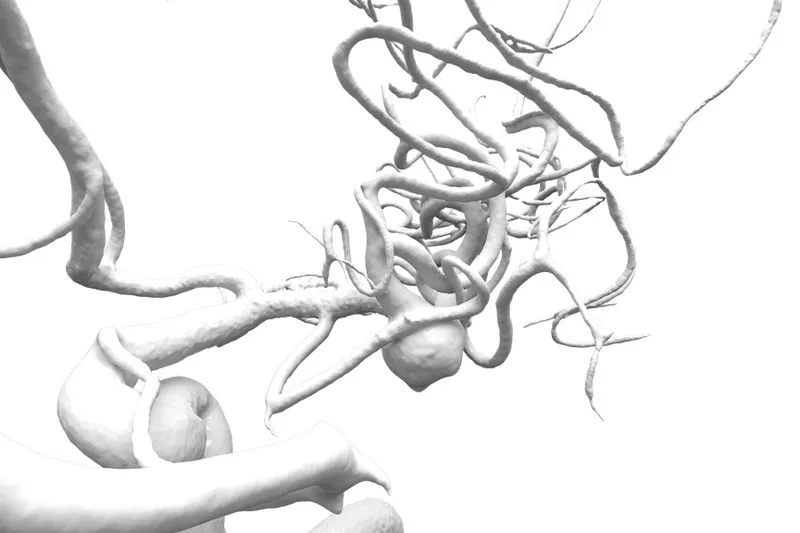
Geometrical and Implicit Modeling
Both the segmentation and reconstruction of the vasculature from 3D Rotational Angiography data have been addressed, and adapted to simulation with a tracking algorithm to segment the vessel tree then with an automatic procedure to reconstruct a skeleton-based implicit surface.

Soft-Robot Software
We work on an unified software framework dedicated to modeling, simulation, and control of soft robots. The framework relies on continuum mechanics for modeling the robotic parts and boundary conditions like actuators and contacts using a unified representation based on Lagrange multipliers.